![]()
![]()
![]()
![]()
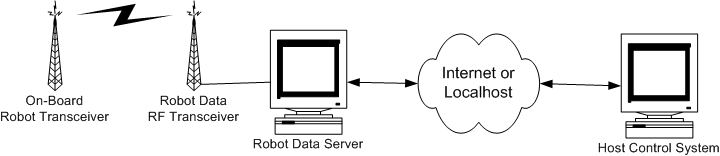
The HCS user interface is just a client of the Robot Data Server. The RDS is a very simple server application with runs on the PC with the serial RF comm's unit attached. It receives and sends data to the serial port (Which is then transmitted via the RF modulator). It then sends this data over a network connection to the HCS, which make be running on the local PC or remotely on some other internet connected system. The diagram below details this communications link:
The communication protocol is very simple. The data sent from the robot can be described as the following packet:
SYNC BYTE, PACKET SIZE, ROBOT DATA
Where the ROBOT DATA comprises:
SONAR DATA, IRRF DATA, BUMP DATA, ORIENTATION, DEGREES TURNED, ACTIVE BEHAVIOUR, MOTOR POWER, STATS, CONFIG (And some more)
Again the communication protocol back to the robot is simple; a comma separated data set. Where a sync byte, data size, config identifier and config data are sent.
SYNC BYTE DATA SIZE 1 [DATA_ID DATA] n
.